SiRo 2.0 er en sød lille robot der er nem og billig at lave. Den styres med en micro:bit og man kan sætte mange forskellige sensorer og værktøjer på den, eller designe sine egne.
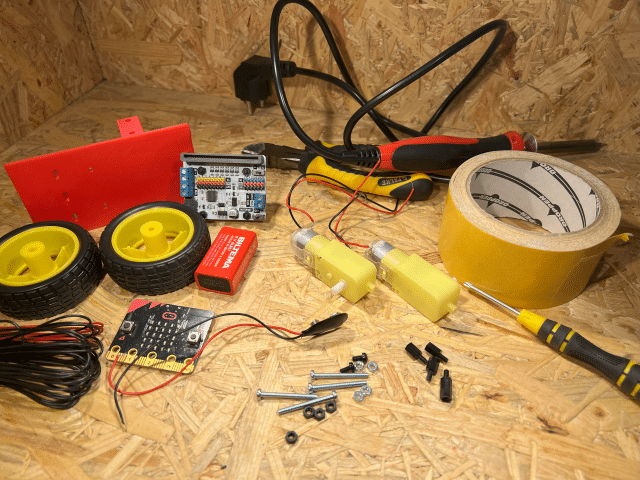
For at lave vores lille microbit robot, så der bruges følgende materialer:
Micro:bit
Motorbit
4 x M3 30mm skruer
2 x M3 6mm skruer
4 x M3 Spacers
8 x M3 møtrikker
2 x TT130 motor
2 x Hjul til TT130 motor
L298N Dual H Bridge motor controller
1 x 9 volt batteri + batteri holder
Lidt ledning. Vil være bedst med to forskellige farver, hvis det er muligt.
Et lille stykke dobbeltklæbende tape
Samt de følgende værktøjer:
3d-printer
Loddekolbe
Tang
Skruetrækker
Det første du skal gøre er at printe selve robotten ud. Designet kan findes på Tinkercad her.
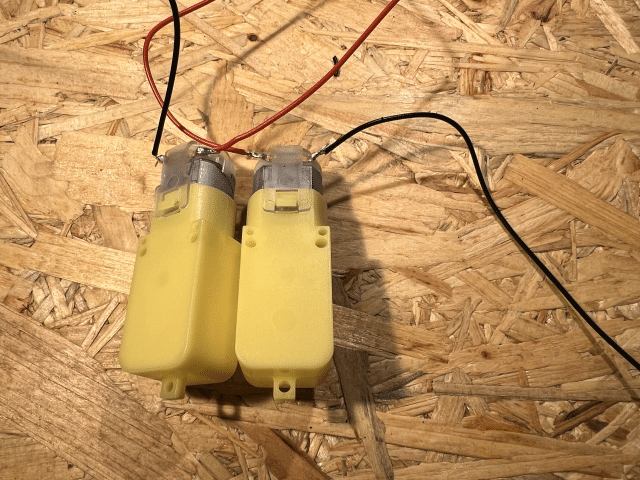
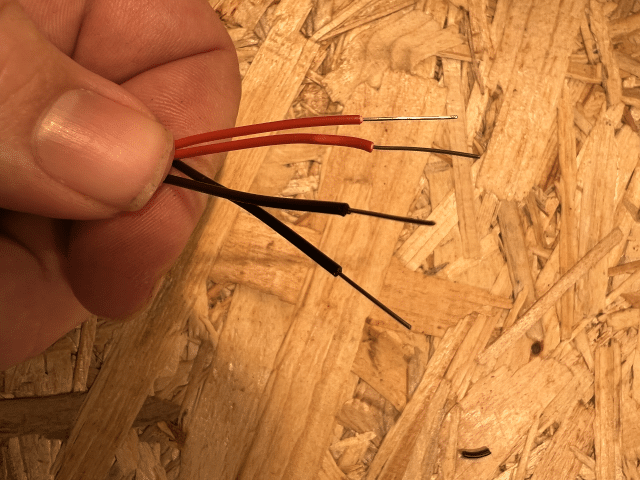
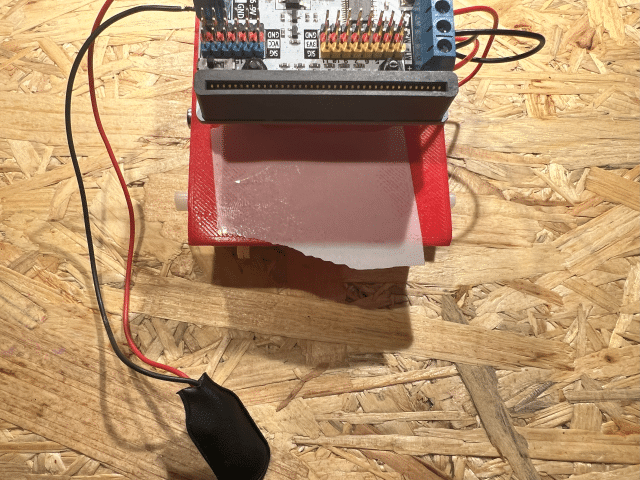
Imens du venter på at 3D printeren bliver færdig, så klip 4 stykker ledning ud. HVer ledning skal være ca. 12 cm lang. Afisolerer dem i begge ender og lod dem fast på TT130 motoren.
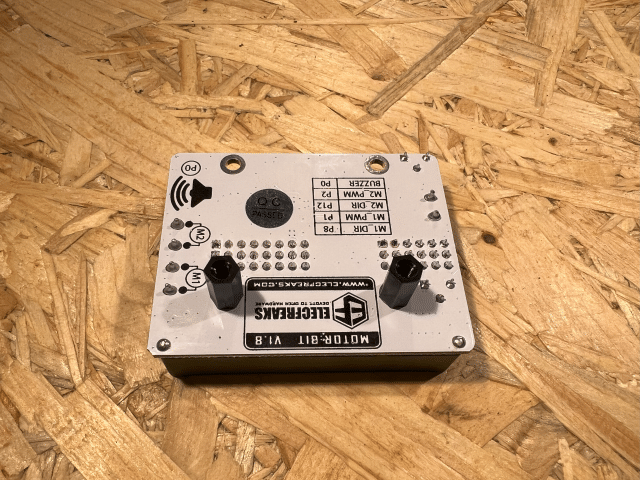
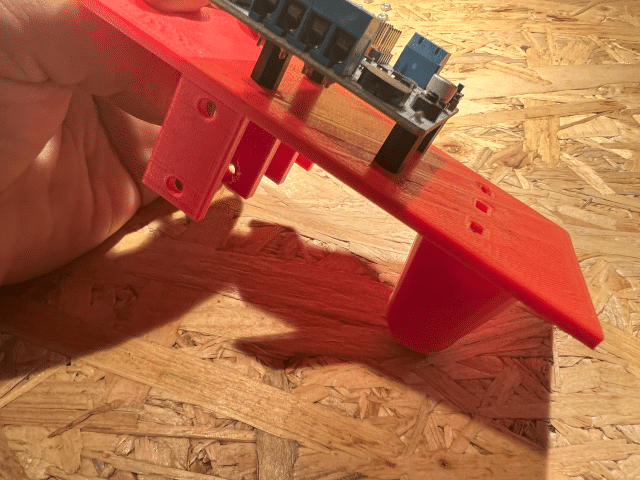
Tag 2 6mm skruer, de 4 spacers og 4 møtrikker. Sæt først de 4 spacer på motorbiten og sæt bagefter motorbiten fast på den 3D printede robot.
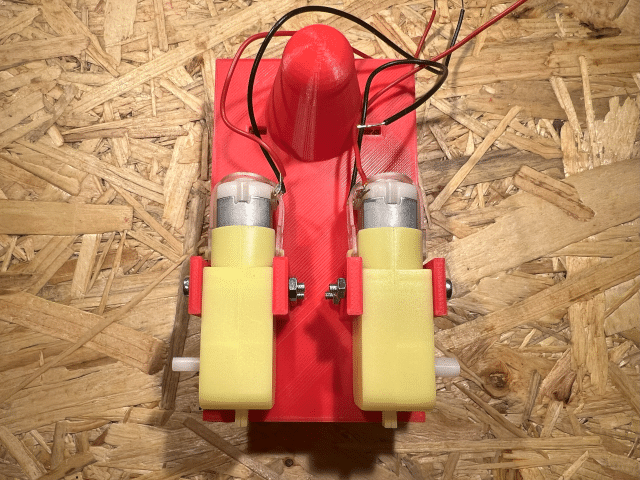
Sæt motorerne fast på kroppen ved hjælp af de sidste 4 møtrikker og de 4 30mm skruer.
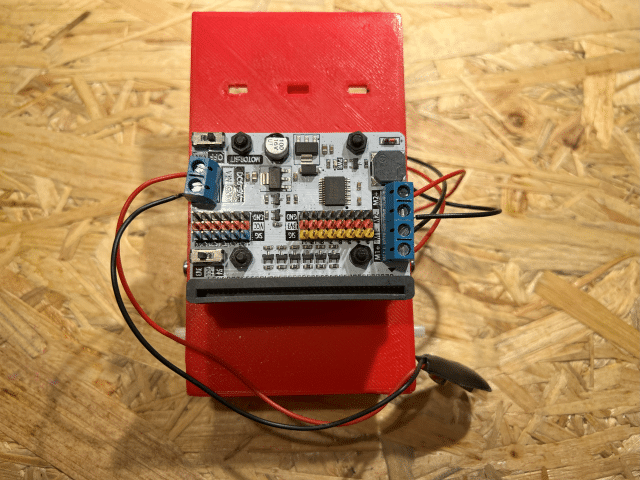
Skrue de 4 ledninger fra motoren fast til micorbitten ved hjælp af skrue terminalerne og skrue bagefter batteriholderen fast.
Husk Rød til + og Sort til -.
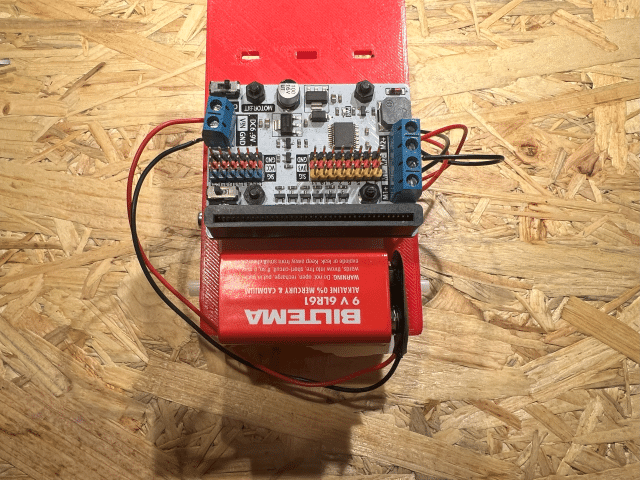
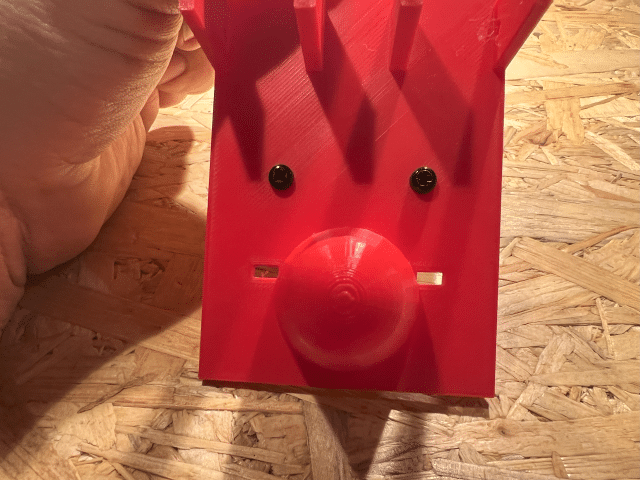
Tag det lille stykke dobbeltklæbende tape og sæt det baggerst på robotten. Sæt der efter 9V batteriet fast i batteriholderen og sæt den derefter oven på tappen.
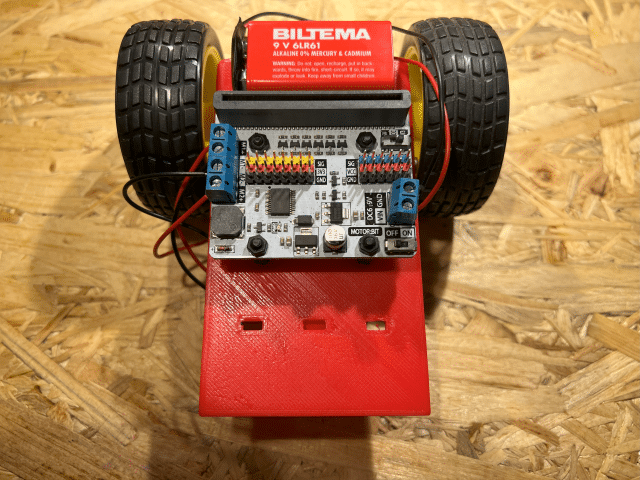
Pres de to hjul fast på motorerne og så er robotten færdig.
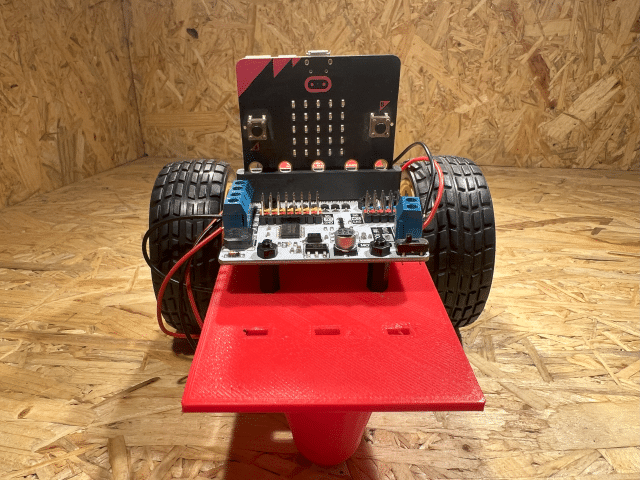
Den færdige robot har et stort åbent stykke overflade med 3 huller ned forrest.
Her kan vi installere sensorer eller forskellige værktøjer.
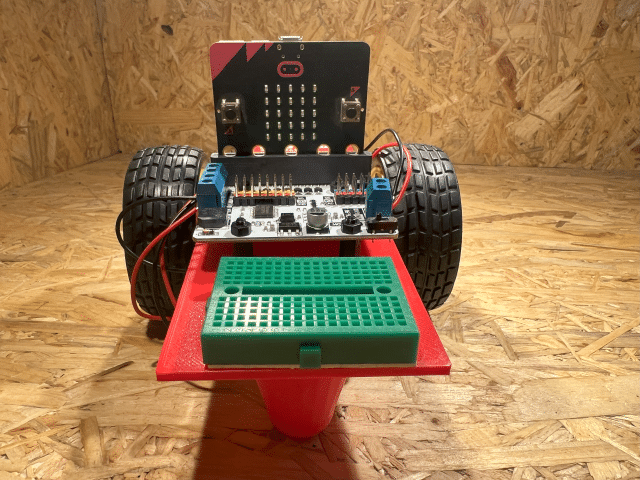
Det nemmeste er nok bare at sætte et lille breadboard på.
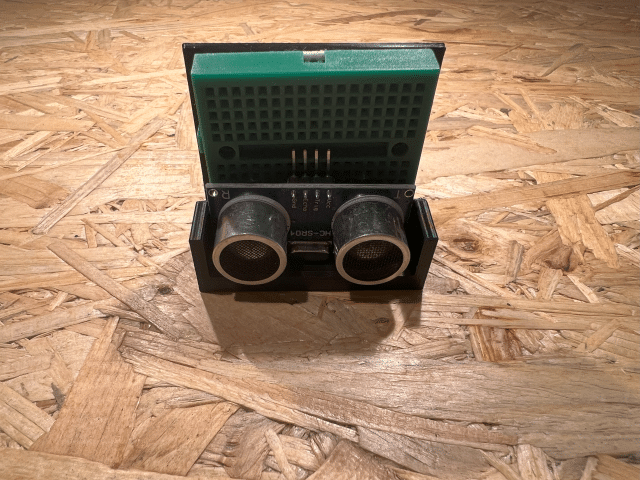

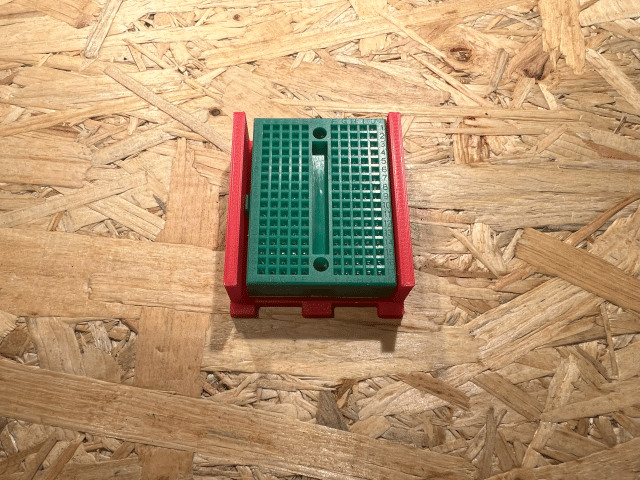
Jeg har dog også designet holdere til ultrasonic sensorer og opretstående breadboards.
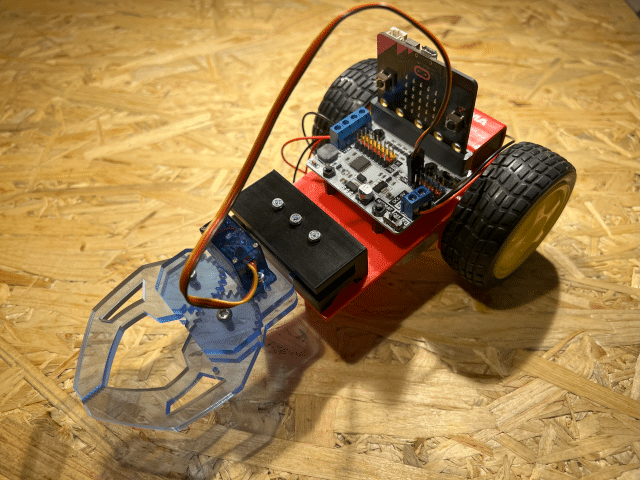
Du kan dog også designe dit eget værktøj eller holder ved at bruge Tinkercad linket her. Der ligger 3 “studs” som passer ind i de tre huller forest på robotten og som jeg har brugt til at designe de andre holder og værktøjer.

